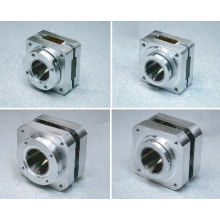
ニークな磁気回路設計と精密組み立て技術で大きな中空径を実現しました。
中空ステッピングモータ HSMシリーズは、ユニークな磁気回路設計と精密組み立て技術で大きな中空径を実現しました。
ロータに大口径の中空を空けるとトルクが小さくなりますが、巻線技術・精密組み立て技術でトルクを最大限大きくなるよう設計しました。
【特徴】
○□36、□47、□50の3種類、用途に応じて選択可能
○各種類に2タイプの中空シャフト形状(VとH)を用意
○ユニークな磁気回路設計と精密組み立て技術で大きな中空径を実現
○中空部分にエアチューブ・ケーブル等を貫通可能
○中空部分にエアノズル・ボールネジ・ギア等の機構部品を搭載可能
ステッピングモーターは執行するエレメントとして、メカトロニクスの一つのキーワードな産品であれ、いろいろな自動化式な制御のシステムに応用される。マイクロエレクトロニクスとコンピューターの発展につれて、ステッピングモーターの需要量はだんだんが増していき、色な国民的な経済分野で応用される。
ステッピングモーターの使用環境には温度のどんな要求を簡単に説明させる:
工業級的なステッピングモーターとドライバの使用環境温度は理論的には負20度から正50度までぐらいである。実際的な応用で、ステッピングモーターは東北には負40度ぐらい、東南の亜高速道路には料金所でケースに正65度に達し、ステッピングモーターが正常に運行することができる。
宇宙工業と軍事工業ではステッピングモーターとドライバの使用環境に特殊な要求があるので、ステッピングモーターの温度範囲が負50度から正130度までに達する。そんなステッピングモーターの材料と技術ははるかに工業級によりすごく、その価格が工業級的なステッピングモーターにより100倍も高い。
高温な環境では、
ステッピングモータドライバの部品もドリフトを出現し、功電流の輸出能力が厳しく下がる。更に部分のICとモジュールが75度の保護を設定した、ステッピングモーターのマグネットが熱消磁を出現し、トルクが下がり、高くすぎる温度がエナメル線絶縁層に溶融される。そのため、環境の温度は50度以上に達するステッピングモーターを使用すれば、50%以上の残量を選択hしなければならない。
低温な環境ではステッピングモーターの部分な材料が脆化な現象が生じる。ステッピングモータドライバの部分な部品はパラメーターのドリフトがあるから、予めに通電で五から十五分を予熱している。
出典:
ステッピングモーターの使用環境には温度の要求について
特徴と、使用上の注意。
1.ブラシレスギヤードモータの特徴
直流整流子(ブラシ)モータは、「小型・軽量」「高速回転によりトルクを得やすい」「制御がしやすい」「コストの選択肢が広い」等々の利点が多々有りますが、長年のネックとなっていましたのは、「整流子ブラシに伴う障害=火花による電気ノイズやブラシの磨耗による寿命」でありました。整流機構を非接触化させることにより、それらの障害を取り除き、且つ整流子モータの利点をそのまま保持させたものが「ブラシレスモータ」です。
2.インナーロータ型ブラシレス「BHL・BH・CBL・CBS・CB」タイプの特徴
インナーロータ仕様ですので、低騒音・低振動であり、イナーシャが少なく応答性に優れています。ネオジマグネットを採用していますので、負荷による回転数の低下率が低く同型モータに比べ高出力です。
● BHL・CBL・CBSモータBHL・CBL・CBS型ブラシレスモータは「新型駆動回路」を搭載しておりますので、今までの「ブラシレスモータは優れているが、別途ドライバ等の準備が煩わしい、接続が大変」等のイメージを払拭し、通常のDCモータ同様にモータからのリード線は2本のみですので、極性を入れ替えるだけでCW⇔CCWの切り替えが可能です。新型駆動回路搭載により、従来のDCブラシ付きモータを使用していた箇所に別途ドライバの準備、コネクタ等の換装なしで置き換えができ、そのままDCブラシ付きモータを駆動していた電源で、CW⇔CCWの駆動ができます。
● BH・CBモータBH・CB型ブラシレスモータは上記「BHL・CBL・CBS」を駆動回路なしにした仕様です。駆動回路なしにすることにより、全長寸法の短縮、ローコストを実現しました。駆動させるための外付け回路も、別途ご用意しておりますので必要に応じてご用命下さい。
ステッピングモーターは多い分類の方法がある。トルクに発生される原理によっては、反応式、永久磁気式、混合式などに分けられる;モータの仕組みはラジアル式、軸方向式、印刷ワインディング式などに分けられる;例示相数によっては、三相、四相、五相、六相などに分けられる;輸出トルクの大小によっては、サーボ式と効率式に分けられる。ステッピングモーターは回転モータと同じで、回転子と固定子から組み立てる。固定子はケイ素鋼板からできている。
1.反応式回転子は高導磁係数の材料で作製され、歯型、無線ループとなり、固定子と回転子の間の誘導電磁力によりモーメントを発生させ相互の位置を維持する。磁極ワインディングが通電をしないときに、トルクに発生されない。旋回角ごとに小さくできる。
2. 永久磁気式回転子は永久マグネットで作成され、モーメントに発生されるときに吸引力と斥力を兼ねる。無励磁の場合で、モーメントを保持するため、旋回角ごとに小さくできない。
3.混合式回転式は永久マグネットで作成され、歯状をした;固定子も反応式の固定子に似う。それは反応式と永久磁気式という2つの方式の長所があるが、仕組みが複雑だ。
ディジタル制御工作機械中で反応式と
混合式ステッピングモーターをよく使う。異なるタイプのステッピングモーターは仕組みと働く原理も違う。
出典:
ステッピングモーターの分類
リニア・レギュレータは、抵抗分圧の原理で、入力電圧を負荷との間で分圧して出力電圧を得る電源回路です(図1)。ただし、通常の抵抗素子で構成すると分圧比が固定されてしまい、入力電圧の変動や負荷が変動したときに出力電圧も変化してしまうため、トランジスタやMOSFETを可変抵抗器として用い、出力電圧をモニターしながら出力電圧が一定になるように制御を行います。
(リニアステッピングモータ)
リニア・レギュレータは、負荷電流が分圧抵抗(トランジスタまたはMOSFET)にそのまま流れるため、抵抗の両端電圧×負荷電流で求められる電力が損失となり、熱となって逃げていきます。そのため、後述するスイッチング・レギュレータに比べて、エネルギーの変換効率が低いというデメリットがあります。
一方で、リニア・レギュレータは、出力リップル(さざなみのような微小な変動)が少なく、かつ、電磁ノイズなどの放射が少ないといった特徴を持つため、きわめて微弱な信号を扱うアンプ段など、ノイズを嫌う回路の電源として使用されます。また
、スイッチング・レギュレータと比較して基本的に低コストで実装できます。

図1. リニア・レギュレータの動作の原理
可変抵抗と負荷抵抗によって分圧回路が構成され、分圧された電圧が負荷に供給される。
分圧抵抗に電流が流れるため損失(熱)が発生する。
制御の角度から見えば、速度速度制御とトルク制御という両者は独立な制御機能である。
速度制御の目標物理量はステッピングモーターの回転速度であれ、トルク制御の目標物理量はステッピングモーターのトルクである。
制御の原理から見えば、速度制御は速度を実際値として
クローズドループ制御をしている。速度レギュレータはグローズドループにあって、輸出を通して電流レギュレータを誘導して、電流レギュレータがステッピングモーターの電流を制御して、適切にステッピングモーターのトルクをレギュレータするので、ステッピングモーターがいつもステッピングモーターの設定を追跡させてて回転する。
速度模式はインバーターが
ステピイングモーターの回転速度を制御することを目標とする。このステッピングモーターのトルクはその速度を保持したり調整したりする。だから、制御センターの内外環は速度環だ、内環が電流環とも呼ばれる。速度環の輸出は電流環の設定だが(トルク設定)、この電流環がとトルク環ともいう。
トルクの模式はインバーターがステッピングモーターの輸出トレクを目標として、速度の大小と外部の負荷大小に関係がある。その時のインバーターは速度環がなくて、電流環がだけで、外部設定が直接に電流環をトルク設定とする。超速を防ぐため、多くの高級インバーターは速度外環制限超速が付んて、エンハンス型なトルク模式だ。その速度環はしか最大速度を制限する作用を起しなくて、電流環はやはり主導な作用を起こす。
出典:
ステッピングモーターの速度制御とトルク制御の区別
モータとは、電気的なエネルギを機械的な運動エネルギに変換する装置です。
モータを分類した一種類がステッピングモータです。ステッピングモータはパルスモータとも呼ばれており、
パルスで回転の角度や速度を制御することが可能なモータです。そのため、様々な業界の装置に利用されています。
回転の角度は、与えられるパルスの数に応じたステップ角度(1パルスで回転する角度)で動きます。
例えば、ステップ角度が1.8°のステッピングモータに100パルス与えると、180°回転させることができます。
速度は、パルス周波数に比例して変化します。周波数が低いと速度は遅く、高いと速くなります。
そして位置決めは、「パルスの数」と「パルス周波数」で決まるため、センサによるフィードバックが不要となります。
この様な「フィードバックが不要な制御方式」がステッピングモータ最大の特徴であるオープンループ制御です。
また、ステッピングモータは停止しているときにも保持力がありますので、機械的ブレーキに頼らなくても停止位置を保てます。

ステッピングモータの簡易構造図を図1に示します。
この構造の「ロータ(回転子)」、「巻線」、「固定子」によって分類したものを、以下にまとめています。
●ステッピングモータの分類
[ロータ(回転子)による分類]
■VR型・・・回転子に歯車状のものを使用するものです。
■PM型・・・回転子に永久磁石を使用するものです。
■HB型・・・VR型とPM型を複合したものです。
[巻線方式による分類]
■ユニポーラ方式・・・巻線の電流を1方向に流す方式のものです。
■バイポーラ方式・・・巻線の電流を双方向に流す方式のものです。
[固定子による分類]
■2相・・・固定子が2つで構成されるものです。
■3相・・・固定子が3つで構成されるものです。
■5相・・・固定子が5つで構成されるものです。
※図に示すのは、2相のステッピングモータです。
「停止精度はあまり高くないのでは」と考えていたら、しっぺ返しを食らうことになるかもしれない。むしろ、ステッピングモーターは停止精度に優れているのだ。その特長に、オープンループで正確な制御が可能だという点がある。たとえばRKⅡシリーズを使用して回転テーブルの位置決めを行った場合、その停止精度は±0.05度以内(無負荷時)。誤差はステップ間で累積しないので、高精度な位置決めができる。エンコーダを必要としないモーター構造は、
ステッピングモーターの駆動システムがシンプルであること、安価であることにもつながっている。
実は、
停止精度がすごい!
たとえばステッピングモーターの停止精度±0.05°をボールねじ機構に換算すると
【使用条件】
●使用モーターRKⅡシリーズ
●ボールねじのリード10mm
↓
停止精度±1.4μm
一般的に研削ボールねじの精度は±10μm。
転造ボールねじの場合はさらに、精度がさがり±20μmなので、ステッピングモーターの停止精度がボールねじの精度より十分に高いのがわかる。
オープンループなのに高い停止制度

正確な位置制御
ステッピングモーターは時計の秒針のように、一定の歩離角ずつ回転するモーターだ。この角度を歩離角と呼ぶ。鳴志会社では基本な離角が1.2°の3相ステッピングモーターと、基本な離角が1.8°の2相ステッピングモーターをご用意している。標準モーター以外にも、鳴志会社はほかの0.72°、0.9°、1.5°、3.6°、075°のような離角を提供する。そのモーターは目録を出現しなくて、具体的な場合なら鳴志会社を連絡してください。
パルス信号で簡単に制御
高精度位置決めをおこなう場合のシステム構成は、下図のようになる。

ステッピングモーターの回転角度と回転速度は、
ステッピングモータドライバからのパルス信号で正確に制御できる。
パルス信号とは
電圧のON/OFFが繰り返される電気信号だ。
ON/OFFの1サイクルを1パルスと数え、1パルスが入力されると1ステップ角度だけモーター出力軸が回転する。
対応電圧ON/OFFの信号レベルは「H」と「L」と呼ばれる。
小型・高トルク
ステッピングモーターの特徴は、小型で高トルクだ。
このため加速性?応答性に優れており、頻繁な起動?停止が必要な用途に威力を発揮する。
また、鳴志会社で減速モーターを提供して、低速下で大きなトルクを得ることができる。
停止位置を自己保持する
ワインディングが通電して、ステッピングモーターは停止しているときにも全部な保持モーメントがあるので、機械的ブレーキに頼らなくても停止位置を保てきる。
電磁ブレーキがつくモーター
電源に切られると、モーターは自己の保持モーメントが消えて、垂直操作中また外力下で停止位置を保てきない。ほかの応用中でこのような電磁ブレーキがつくモーターを進める。
出典:
ステッピングモーターの特徴と長所





